Lo Que Microsoft Mostro en el PDC 2008
Se Llama Second Light.
http://www.youtube.com/watch?v=XfzplPIrzjY
LAS RANURAS DE EXPASION QUE SON & TIPOS DE RANURAS
Las tarjetas de expansión se conectan a los buses mediante ranuras (conectores alargados que se encuentran soldados a la placa base). Hay que recordar que los Buses son conexiones paralelas, cada bit que compone una palabra va por un hilo diferente. Cuando los buses conectan periféricos que están físicamente separados se denominan también canales. Y mientras sean estas conexiones de cobre y dependiendo de la placa base y del procesador tendrán 16, 32 o 64 hilos.
Tipos de ranuras:
- ISA ( negras y largas, con dos grupos de conectores separados por un espacio miden unos 14 cm (existe una versión más vieja de sólo 8,5 cm): Son ranuras de 16 contactos-bits. Eran las únicas que había en ordenadores 486. Todavía hay placas base que incorporan un par de estas ranuras para recuperar placas antiguas. En la actualidad solamente se fabrican tarjetas de red para este tipo de ranuras. Funcionan a una frecuencia de reloj máxima de 8Mhz y proporcionan un máximo de 16 Mb/s de transmisión de datos, suficiente para conectar un mó dem o una tarjeta de sonido, pero poco para tarjetas de vídeo con prestaciones a partir de 256 colores (aunque admiten v iejas tarjetas CGA a 16
 colores).
colores).

 hz dependiendo de la placa b ase. Estas ranuras son de propósito general y son multidestino y multimaestras, son las que predominan en este momen to. Se está desarrollando el estándar P CI64, que permitirá 64 bits a 66 Mhz, que permitirán a los procesadores de 64 bits trabajar utilizando toda la capacidad y velocidad que tienen.
hz dependiendo de la placa b ase. Estas ranuras son de propósito general y son multidestino y multimaestras, son las que predominan en este momen to. Se está desarrollando el estándar P CI64, que permitirá 64 bits a 66 Mhz, que permitirán a los procesadores de 64 bits trabajar utilizando toda la capacidad y velocidad que tienen.  que las PCI y más cortas que las ISA y están separadas del borde de la placa base): Este tipo de conexión permite el acceso directo de la tarjeta a la memoria principal del ordenador y se dedica exclusivamente a conectar tarjetas de vídeo 3D, por lo que suele haber sólo una.. Permiten una velocidad de transferencia de 264 Mb/s a 533MB/s sobre 32 bits, dependiendo de la placa base. Desde Windows95 y NT 4.0 están soportadas y son las que se utilizan desde hace ya un par de años para las tarjetas de video ( controladoras de video). En 2002 empezaron a estar disponibles las primer as placas base con AGP X8.
que las PCI y más cortas que las ISA y están separadas del borde de la placa base): Este tipo de conexión permite el acceso directo de la tarjeta a la memoria principal del ordenador y se dedica exclusivamente a conectar tarjetas de vídeo 3D, por lo que suele haber sólo una.. Permiten una velocidad de transferencia de 264 Mb/s a 533MB/s sobre 32 bits, dependiendo de la placa base. Desde Windows95 y NT 4.0 están soportadas y son las que se utilizan desde hace ya un par de años para las tarjetas de video ( controladoras de video). En 2002 empezaron a estar disponibles las primer as placas base con AGP X8.CNR & AMR( marrones más cortos que los PCI): Se están empezando a utilizar para comunicaciones avanzadas.


PCI Express (Modulo Nuevo)

TARJETAS DE EXPANSION: QUE SON & TIPOS EXISTEN.
Estas tarjetas pueden ser de varios tipos, tanto en su conexión como en su cometido.
En cuanto a su conexión, pueden ser tarjetas ISA (ya en desuso),AGP(exclusivas Para video) PCI, PCIx, PCIe 1x, PCIe 4x, PCIe 16x o PCMCIA, esta última para ordenadores portátiles, que está siendo sustituida por las ExpressCard.
No debemos confundir los puertos PCIx (bastante raros, utilizados solo en placas profesionales y de servidor) con los PCIe, o PCIexpress, que son los nuevos puertos PCI, cuyo uso más conocido es el del PCIe x16 para tarjetas gráficas.
Las tarjetas de expansión pueden ser de muchos tipos. Vamos a ver las más habituales:
Tarjeta PCI-USB:

Tarjeta PCI-IEEE1394:
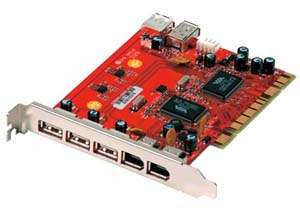
Nos provee de puertos IEEE1394 (Firewire) en nuestro PC. Normalmente estas tarjetas llevan también algún puerto USB. Suelen llevar alguno interno.
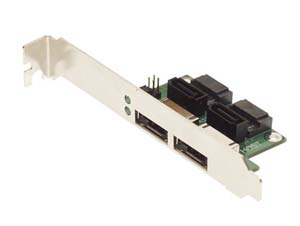
Tarjeta PCI-SATA:

Tarjeta PCI-IDE:
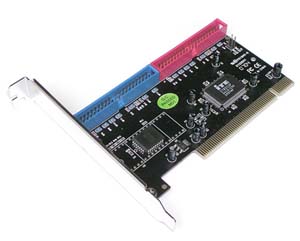
Con ella podemos ampliar el número de puertos IDE de nuestro ordenador.
Tarjeta PCI-RAID:

Tarjeta PCI-Paralelo:
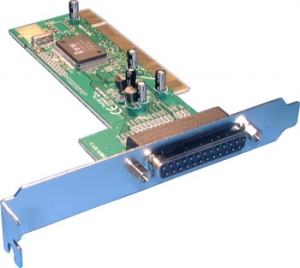
Nos permite ampliar el número de puertos paralelos de nuestro ordenador.
Tarjeta PCI-Serie:

Nos permite ampliar el número de puertos serie de nuestro ordenador.
Tarjetas PCI-SCSI:

Tarjeta adaptador PCMCIA:

Estos adaptadores se utilizan para poder poner una tarjeta PCMCIA en nuestro PC.
Bracket:

El Procesador

Este es el cerebro del computador. Dependiendo del tipo de procesador y su velocidad se obtendrá un mejor o peor rendimiento. Hoy en día existen varias marcas y tipos, de los cuales intentaremos darles una idea de sus características principales.
Las familias (tipos) de procesadores compatibles con el PC de IBM usan procesadores x86. Esto quiere decir que hay procesadores 286, 386, 486, 586 y 686. Ahora, a Intel se le ocurrió que su procesador 586 no se llamaría así sino "Pentium", por razones de mercadeo.
Los Proce sadores se determinan en funcion del tipo o modelo de socket.
sadores se determinan en funcion del tipo o modelo de socket.
Haga Click sobre el enlace mas abajo para ver los diferentes tipos de sockets y sus características:
http://www.duiops.net/hardware/micros/sockets.htm
Los Discos Duros Tipos & Conexiones
 El disco duro es un dispositivo de almacenamiento no volátil, es decir conserva la información que le ha sido almacenada de forma correcta aun con la perdida de energía, emplea un sistema de grabación magnética digital, es donde en la mayoría de los casos se encuentra almacenado el sistema operativo de la computadora. En este tipo de disco se encuentra dentro de la carcasa una serie de platos metálicos apilados girando a gran velocidad. Sobre estos platos se sitúan los cabezales encargados de leer o escribir los impulsos magnéticos. Hay distintos estándares a la hora de comunicar un disco duro con la computadora. Existen distintos tipos de interfaces las mas comunes son: Integrated Drive Electronics (IDE, también llamado ATA) , SCSI generalmente usado en servidores, SATA, este último estandarizado en el año 2004 y FC exclusivo para servidores.
El disco duro es un dispositivo de almacenamiento no volátil, es decir conserva la información que le ha sido almacenada de forma correcta aun con la perdida de energía, emplea un sistema de grabación magnética digital, es donde en la mayoría de los casos se encuentra almacenado el sistema operativo de la computadora. En este tipo de disco se encuentra dentro de la carcasa una serie de platos metálicos apilados girando a gran velocidad. Sobre estos platos se sitúan los cabezales encargados de leer o escribir los impulsos magnéticos. Hay distintos estándares a la hora de comunicar un disco duro con la computadora. Existen distintos tipos de interfaces las mas comunes son: Integrated Drive Electronics (IDE, también llamado ATA) , SCSI generalmente usado en servidores, SATA, este último estandarizado en el año 2004 y FC exclusivo para servidores.Tal y como sale de fábrica, el disco duro no puede ser utilizado por un sistema operativo. Antes tenemos que definir en él un formato de bajo nivel, una o más particiones y luego hemos de darles un formato que pueda ser entendido por nuestro sistema.
También existe otro tipo de discos denominados de estado sólido que utilizan cierto tipo de memorias construidas con semiconductores para almacenar la información. El uso de esta clase de discos generalmente se limitaba a las supercomputadoras, por su elevado precio, aunque hoy en día ya se puede encontrar en el mercado unidades mucho más económicas de baja capacidad (hasta 64 GB) para el uso en computadoras personales (sobre todo portátiles). Así, el caché de pista es una memoria de estado sólido, tipo memoria RAM, dentro de un disco duro de estado sólido.
Estructura física
Dentro de un disco duro hay varios platos (entre 2 y 4), que son discos (de aluminio o cristal) concéntricos y que giran todos a la vez. El cabezal (dispositivo de lectura y escritura) es un conjunto de brazos alineados verticalmente que se mueven hacia dentro o fuera según convenga, todos a la vez. En la punta de dichos brazos están las cabezas de lectura/escritura, que gracias al movimiento del cabezal pueden leer tanto zonas interiores como exteriores del disco.
Cada plato tiene dos caras, y es necesaria una cabeza de lectura/escritura para cada cara (no es una cabeza por plato, sino una por cara). Si se mira el esquema Cilindro-Cabeza-Sector (más abajo), a primera vista se ven 4 brazos, uno para cada plato. En realidad, cada uno de los brazos es doble, y contiene 2 cabezas: una para leer la cara superior del plato, y otra pa
ra leer la cara inferior. Por tanto, hay 8 cabezas para leer 4 platos. Las cabezas de lectura/escritura nunca tocan el disco, sino que pasan muy cerca (hasta a 3 nanómetros) ó 3 millonésimas de milímetro. Si alguna llega a tocarlo, causaría muchos daños en el disco, rayándolo gravemente, debido a lo rápido que giran los platos (uno de 7.500 revoluciones por minuto se mueve a 120 km/h en el borde).
Direccionamiento
Hay varios conceptos para referirse a zonas del disco:
- Plato: Cada uno de los discos que hay dentro del disco duro.
- Cara: Cada uno de los dos lados de un plato
- Cabeza: Número de cabezales;
- Pista: Una circunferencia dentro de una cara; la pista 0 está en el borde exterior.
- Cilindro: Conjunto de varias pistas; son todas las circunferencias que están alineadas verticalmente (una de cada cara).
- Sector : Cada una de las divisiones de una pista. El tamaño del sector no es fijo, siendo el estándar actual 512 bytes. Antiguamente el número de sectores por pista era fijo, lo cual desaprovechaba el espacio significativamente, ya que en las pistas exteriores pueden almacenarse más sectores que en las interiores. Así, apareció la tecnología ZBRgrabación de bits por zonas) que aumenta el número de sectores en las pistas exteriores, y usa más eficientemente el disco duro. (
El primer sistema de direccionamiento que se usó fue el CHS (cilindro-cabeza-sector), ya que con estos tres valores se puede situar un dato cualquiera del disco. Más adelante se creó otro sistema más sencillo: LBA (direccionamiento lógico de blo
ques), que consiste en dividir el disco entero en sectores y asignar a cada uno un único número. Este es el que actualmente se usa.
Si hablamos de disco rígido podemos citar a los distintos tipos de conexión que poseen los mismos con la placa madre, es decir pueden ser SATA, IDE o SCSI.
IDE: Integrated Device Electronics, "Dispositivo con electrónica integrada") o ATA (Advanced Technology Attachment), con
trola los dispositivos de almacenamiento masivo de datos, como los discos duros y ATAPI (Advanced Technology Attachment Packet Interface) Hasta hace bien poco, el estándar principal por su versatilidad y relación calidad/precio.
SCSI: Son discos duros de gran capacidad de almacenamiento (desde 5 GB hasta 23 GB). Se presentan bajo tres especificaciones: SCSI Estándar (Standard SCSI), SCSI Rápido (Fast SCSI) y SCSI Ancho-Rápido (Fast-Wide SCSI). Su tiempo medio de acceso puede llegar a 7 mseg y su velocidad de transmisión secuencial de información puede alcanzar teóricamente los
5 Mbps en los discos SCSI Estándares, los 10 Mbps en los discos SCSI Rápidos y los 20 Mbps en los discos SCSI Anchos-Rápidos (SCSI-2).
Un controlador SCSI puede manejar hasta 7 discos duros SCSI (o 7 periféricos SCSI) con conexión tipo margarita (daisy-chain). A diferencia de los discos IDE, pueden trabajar asincrónicamente con relación al microprocesador, lo que los vuelve más rápidos.
SATA (Serial ATA): Nu
evo estándar de conexión que utiliza un bus serie para la transmisión de datos. Notablemente más rápido y eficiente que IDE. En la actualidad hay dos versiones, SATA 1 de hasta 1.5 Gb/s (150 MB/s) y SATA 2 de hasta 3.0 Gb/s (300 MB/s) de velocidad de transferencia.

Tipos de Conexiones:
- Conexión E-IDE (en desuso)
- Conexión SATA ( Nueva tec.)
Estructura lógica
Dentro del disco se encuentran:
- El Master Boot Record (en el sector de arranque), que contiene la tabla de particiones.
- Las particiones, necesarias para poder colocar los sistemas de archivos.
Funcionamiento Mecánico
Un disco duro suele tener:
- Platos en donde se graban los datos,
- Cabezal de lectura/escritura,
- Motor que hace girar los platos,
- Electroimán que mueve el cabezal,
- circuito electrónico de control, que incluye: interfaz con la computadora, memoria caché,
- Bolsita desecante (gel de sílice) para evitar la humedad,
- Caja, que ha de proteger de la suciedad (aunque a veces no está al vacío)
- Tornillos, a menudo especiales.
Fabricantes.
- Western Digital
- Seagate
- Maxtor que pasa a ser de Seagate.
- Samsung
- Hitachi
- Fujitsu
- Quantum Corp.
- Tos hiba
En informática, el jumper es un elemento para interconectar dos terminales de manera temporal sin tener que efectuar una operación que requiera herramienta adicional, dicha unión de terminales cierran el circuito eléctrico del que forma parte.
Características

El modo de funcionamiento del dispositivo, que es lo opuesto a la configuración por "software", donde de distinto modo se llega al mismo resultado: cambiar la configuración, o modo de operación del dispositivo, no se olviden que es para configurar diferentes opciones de operaciones de
tu ordenador.
La principal dificultad al hacer la configuración, es la información del fabricante del dispositivo, que en algunos casos, esta solamente en el manual de operación del mismo o algunas veces, con su leyenda respectiva impresa por la placa de circuito impreso donde está montado el jumper.
Sin los jumpers, el disco duro, el lector de CD-ROM o disquetes, no funcionarían por que no tendrían definido el rol de cada uno (Primario/Master o Secundario/Esclavo/Slave). los jumpers se definen como unidades o dispositivos que permiten controlar el flujo de informacion que se genera a traves de las autopistas.
Usos
Una de sus aplicaciones más habituales se encuentra en unidades IDE  (discos duros, lectores y grabadoras de CD y DVD), donde se emplean para distinguir entre maestro y esclavo. También se usan para definir el voltaje y la velocidad del procesador (Multiplicador del FSB). También se usa para borrar la configuración de la BIOS, quitando durante un rato un jumper.
(discos duros, lectores y grabadoras de CD y DVD), donde se emplean para distinguir entre maestro y esclavo. También se usan para definir el voltaje y la velocidad del procesador (Multiplicador del FSB). También se usa para borrar la configuración de la BIOS, quitando durante un rato un jumper.
Sus usos pueden ser muy variados ya que son unos elementos muy fáciles de programar.
Video Instalación de Un Disco Duro:
La Mother Board (tarjeta madre o Placa base)

La placa base, placa madre, tarjeta madre o board (en inglés motherboard, mainboard) es la tarjeta de circuitos impresos de una computadora que sirve como medio de conexión entre el microprocesador, los circuitos electrónicos de soporte, las ranuras para conectar parte o toda la RAM del sistema, la ROM y las ranuras especiales (slots) que permiten la conexión de tarjetas adaptadoras adicionales. Estas tarjetas de expansión suelen realizar funciones de control de periféricos tales como monitores, impresoras, unidades de disco, etc.
Se diseña básicamente para realizar labores específicas vitales para el funcionamiento de la computadora, como por ejemplo las de:
- Conexión física.
- Administración, control y distribución de energía eléctrica.
- Comunicación de datos.
- Temporización.
- Sincronismo.
- Co
 ntrol y monitoreo.
ntrol y monitoreo.

Las Memorias RAM
Se trata de una memoria de tipo volátil, es decir, que se borra cuando apagamos el ordenador, aunque también hay memorias RAM no volátiles (como por ejemplo las memorias de tipo flash.
Los datos almacenados en la memoria RAM no sólo se borran cuando apagamos el ordenador, sino que tambien deben eliminarse de esta cuando dejamos de utilizarlos (por ejemplo, cuando cerramos el fichero que contiene estos datos).
Estas memorias tienen unos tiempos de acceso y un ancho de banda mucho más rápido que el disco duro, por lo que se han convertido en un factor determinante para la velocidad de un ordenador. Esto quiere decir que, dentro de unos límites, un ordenador irá más rápido cuanta mayor sea la cantidad de memoria RAM que tenga instalada, expresada en MegaBytes o GigaBytes.
Los chips de memoria suelen ir conectados a unas plaquitas denominadas módulos, pero no siempre esto ha sido así, ya que hasta los ordenadores del tipo 8086 los chips de memoria RAM estaban soldados directamente a la placa base.
Con los ordenadores del tipo 80386 aparecen las primeras memorias en módulos, conectados a la placa base mediante zócalos, normalmente denominados bancos de memoria, y con la posibilidad de ampliarla (esto, con los ordenadores anteriores, era prácticamente imposible).

Los primeros módulos utilizados fueron los denominados SIMM (Single In-line Memory Module). Estos módulos tenían los contactos en una sola de sus caras y podían ser de 30 contactos (los primeros), que posteriormente pasaron a ser de 72 contactos.

Este tipo de módulo de memoria fue sustituido por los módulos del tipo DIMM (Dual In-line Memory Module), que es el tipo de memoria que se utilizo hasta la aparicion de las DDR.
Esta clasificación se refiere exclusivamente a la posición de los contactos.

En cuanto a los tipos de memoria, la clasificación que podemos hacer es la siguiente:
Tipos De memoria
DRAM:
Las memorias DRAM (Dynamic RAM) fueron las utilizadas en los primeros módulos (tanto en los SIMM como en los primeros DIMM). Es un tipo de memoria más barata que la SDRAM, pero también bastante más lenta, por lo que con el paso del tiempo ha dejado de utilizarse. Esta memoria es del tipo asíncronas, es decir, que iban a diferente velocidad que el sistema, y sus tiempos de refresco eran bastante altos (del orden de entre 80ns y 70ns), llegando en sus últimas versiones, las memorias EDO-RAM a unos tiempos de refresco de entre 40ns y 30ns.
Las memorias SDRAM (Synchronous Dynamic RAM) son las utilizadas actualmente (aunque por SDRAM se suele identificar a un tipo concreto de módulos, en realidad todos los módulos actuales son SDRAM).
Son un tipo de memorias síncronas, es decir, que van a la misma velocidad del sistema, con unos tiempos de acceso que en los tipos más recientes son inferiores a los 10ns, llegando a los 5ns en los más rápidos.
Las memorias SDRAM se dividen a su vez en varios tipos :
SDR:
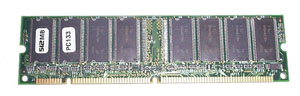
Módulo SDR. Se pueden ver las dos muescas de posicionamiento.
Los módulos SDR (Single Data Rate) son los conocidos normalmente como SDRAM, aunque, como ya hemos dicho, todas las memorias actuales son SDRAM.
Se trata de módulos del tipo DIMM, de 168 contactos, y con una velocidad de bus de memoria que va desde los 66MHz a los 133MHz. Estos módulos realizan un acceso por ciclo de reloj.
Empiezan a utilizarse con los Pentium II y su utilización llega hasta la salida de los Pentium 4 de Intel y los procesadores Athlon XP de AMD, aunque las primeras versiones de este último podían utilizar memorias SDR.
Este tipo de módulos se denominan por su frecuencia, es decir, PC66, PC100 o PC133.
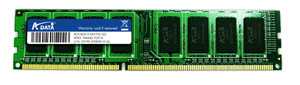
DDR:

Módulo DDR. Vemos que tiene una sola muesca de posicionamiento, situada a la derecha del centro del módulo.
Los módulos DDR SDRAM (Double Data Rate SDRAM) son una evolución de los módulos SDR. Se trata de módulos del tipo DIMM, de 184 contactos y 64bits, con una velocidad de bus de memoria de entre 100MHz y 200MHz, pero al realizar dos accesos por ciclo de reloj las velocidades efectivas de trabajo se sitúan entre los 200MHz y los 400MHz. Este es un punto que a veces lleva a una cierta confusión, ya que tanto las placas base como los programas de información de sistemas las reconocen unas veces por su velocidad nominal y otras por su velocidad efectiva.
Comienzan a utilizarse con la salida de los Pentium 4 y Thlon XP, tras el fracasado intento por parte de Intel de imponer para los P4 un tipo de memoria denominado RIMM, que pasó con más pena que gloria y tan sólo llegó a utilizarse en las primeras versiones de este tipo de procesadores (Pentium 4 Willamette con socket 423).
Estas memorias tienen un consumo de entre 0 y 2.5 voltios.
Este tipo de módulos se está abandonando, siendo sustituido por los módulos del tipo DDR2.
DDR2:

Módulo DDR2. Vemos que tiene una sola muesca de posicionamiento, situada a la derecha del centro del módulo, aunque más hacia en centro que en los módulos DDR. También se puede apreciar la mayor densidad de contactos.
Los módulos DDR2 SDRAM son una evolución de los módulos DDR SDRAM. Se trata de módulos del tipo DIMM, en este caso de 240 contactos y 64bits. Tienen unas velocidades de bus de memoria real de entre 100MHz y 266MHz, aunque los primeros no se comercializan.
La principal característica de estos módulos es que son capaces de realizar cuatro accesos por ciclo de reloj (dos de ida y dos de vuelta), lo que hace que su velocidad de bus de memoria efectiva sea el resultado de multiplicar su velocidad de bus de memoria real por 4.
Esto duplica la velocidad en relación a una memoria del tipo DDR, pero también hace que los tiempos de latencia sean bastante más altos (pueden llegar a ser el doble que en una memoria DDR).
El consumo de estas memorias se sitúa entre los 0 y 1.8 voltios, es decir, casi la mitad que una memoria DDR.
Tanto las memorias DDR como las memorias DDR2 se suelen denominar de dos formas diferentes, o bien en base a su velocidad de bus de memoria efectiva (DDR-266, DDR-333, DDR-400, DDR2-533, DDR2-667, DDR2-800) o bien por su ancho de banda teórico, es decir, por su máxima capacidad de transferencia (PC-2100, PC-2700 y PC-3200 en el caso de los módulos DDR y PC-4200, PC-5300 y PC-6400 en el caso de los módulos DDR2).
El Ancho de banda de los módulos DDR y DDR2 se puede calcular multiplicando su velocidad de bus de memoria efectiva por 8 (DDR-400 por 8 = PC-3200).
El último y más reciente tipo de memorias es el DDR3.
Módulo DDR. Vemos que tiene una sola muesca de posicionamiento, situada en esta ocasión a la izquierda del centro del módulo.
Este tipo de memorias (que ya han empezado a comercializarse, y están llamadas a sustituir a las DDR2) son también memorias del tipo SDRAM DIMM, de 64bits y 240 contactos, aunque no son compatibles con las memorias DDR2, ya que se trata de otra tecnología y además físicamente llevan la muesca de posicionamiento en otra situación.
Según las informaciones disponibles se trata de memorias con una velocidad de bus de memoria real de entre 100MHz y 250MHz, lo que da una velocidad de bus de memoria efectiva de entre 800MHz y 2000MHz (el doble que una memoria DDR2 a la misma velocidad de bus de memoria real), con un consumo de entre 0 y 1.5 voltios (entre un 16% y un 25% menor que una DDR2) y una capacidad máxima de transferencia de datos de 15.0GB/s.
En cuanto a la medida, en todos los casos de memorias del tipo SDRAM (SDR, DDR, DDR2 y DDR3) se trata de módulos de 133mm de longitud.
Una cuestión a considerar es que estos tipos de módulos no son compatibles entre sí, para empezar porque es físicamente imposible colocar un módulo en un banco de memoria que no sea de su tipo, debido a la posición de la muesca de posicionamiento.
Hay en el mercado un tipo de placas base llamadas normalmente duales (OJO, no confundir esto con la tecnología Dual Channel) que tienen bancos para dos tipos de módulos (ya sean SDR y DDR o DDR y DDR2), pero en estos casos tan sólo se puede utilizar uno de los tipos. Esto quiere decir que en una placa base dual DDR - DDR2, que normalmente tiene cuatro bancos (dos para DDR y otros dos para DDR2), podemos poner dos módulos DDR o dos módulos DDR2, pero NO un módulo DDR y otro DDR2 o ninguna de sus posibles combinaciones. Es decir, que realmente sólo podemos utilizar uno de los pares de bancos, ya sea el DDR o el DDR2.
Tipos de Case o Chasis
- Torre
- Mid-Tower
- Mini-Tower

- Desktop
- Mini-Desktop

Torre (tower)
Este es utilizado generalmente cuando vamos a utilizar diversos dispositivos de alta gama y es utilizado con Mas Frecuencia en las empresas para los servidores.
 Mid-Tower
Mid-TowerEste tiene un tamaño mas reducido puede tener 3 a 4 bahías de 5 ¼ para las unidades lectoras 2 bahías de 3 ½ para los ya obsoletos diskettes y de 3 a 4 bahías de 3 ½ para las unidades de disco rígido.
Mini-Tower
Este chasis contiene un tamaño aun mas reducido que el anterior contiene solo 2 bahías de 5 ¼ para las unidades lectoras 1 bahía para la disktera y 2 bahías internas de 3 ½ para los discos.

Desktop
El Chasis desktop esta pensado originalmente para las oficinas y empresas por su ahorro de espacio ya que el monitor se ubica encima de este.

Mini- desktop
Es una versión mas reducida del tipo desktop y se caracteriza por tener una bahía para cada tipo de dispositivo incluyendo el sistema de energía que en algunos casos este viene con tomas de energía reducidas para los dispositivos así como una fuente de poder ligeramente diferente a la hora de desarmar y reparar.
El Case o Chasis

Antecedentes de las Computadoras

Una Computadora digital moderna es en gran medida un conjunto de interruptores electrónicos, los cuales utilizan para representar y controlar el recorrido de datos denominados dígitos binarios (o bits). La naturaleza de activo/inactivo (o encendido/apagado) de la información binaria y enrutado de señales que emplea la computadora, hizo que se necesitara un interruptor electrónico eficiente. Las primeras computadoras electrónicas utilizan como interruptores los bulbos o tubos al vacío y éstos, aunque funcionaban, tenían muchos problemas.
El bulbo era ineficiente como interruptor. Consumía una gran cantidad de corriente eléctrica o generaba calor enorme – un problema significativo en los primeros sistemas -. A causa del calor que producían, principalmente, los bulbos se destacaron por no ser confiables; en los grandes sistemas fallaban uno aproximadamente cada dos horas.
El desarrollo del transistor o semiconductor fue uno de los inventos más importantes para la revolución de la computadora personal. El transistor que en esencia funcionaba como un interruptor electrónico de estado sólido, sustituyó al bulbo que era mucho menos aceptable. Ya que el transistor era mucho más pequeño y consumía considerablemente menos energía, un sistema de computadora construido con transistores era mucho más pequeño, rápido y eficiente que uno integrado por bulbos.
La conversión a transistores provocó la tendencia hacia la miniaturización que continúa hasta hoy. Los pequeños sistemas de computadora personal laptop, los cuales operaban con baterías, tienen más poder de cómputo que muchos de los primeros sistemas que abarcan cuartos enteros enormes de cantidades de corriente eléctrica.
En 1959, los ingenieros de Texas Instruments inventaron el CI (Circuito Integrado ó chip), un semiconductor que contiene más de un transistor sobre la misma base (o substrato) y que conecta los transistores sin necesidad de cables.
En 1969, Intel introdujo un chip de memoria de 1 Kbit4, que era mucho mayor de lo que había disponible en ese momento.
El primer microprocesador – el 4004 de Intel, un procesador de 4 bits – apareció en 1971 y operaba sobre 4 bits de datos a la vez. El sucesor del 4004 fue el microprocesador de 8 bits 8008, presentado en 1972.
A finales de 1973, intel presentó el microprocesador 8080, que era 10 veces más rápido que el 8008 y direccionala 64 kb de memoria.
En 1975 en el artículo central de la revista Popular Electronics, el MITS presentó el equipo Altair, al que se consideraba la primera computadora personal. Este equipo comprendía de un procesador 8080, una fuente de poder, un tablero frontal con gran cantidad de luces y 256 bytes (no kilobytes) de memoria. Tenía un costo de 395 dólares y había que armarlo. La computadora incluía un bus de arquitectura abierta (ranuras) que aceptaba diversoscomplementos y periféricos de otras compañías en el mercado. El nuevo procesador inspiró a otras empresas a escribir programas, incluyendo el sistema operativo CP/M5 (Programa de control para Microprocesadores) y la primera versión del lenguaje de programación BASIC (Código General de Instrucciones Simbólicas para principiantes) de Microsoft.
En 1975, IBM presentó lo que podría llamarse su primera computadora personal. El modelo 5100 tenía 16 KB de memoria, una pantalla integrada de 16 líneas por 64 caracteres, un intérprete integrado del lenguaje BASIC y una unidad de cinta de cartucho DC-300 para almacenamiento. El precio de 9,000 dólares, sacó a este sistema del mercado principal de las computadoras personales, que era dominado por experimentadores quienes fabrican equipos de bajo costo (alrededor de 500 dólares) como pasatiempo.
Al modelo 5100 siguieron el 5110 y el 5120 de que IBM presentará los que conocemos como la Computadora Personal ó PC.
En 1976, una nueva compañía de nombre Apple Computer presentó el Apple I, la cual se vendía por 695 dólares. El sistema consistía de una tarjeta de circuitos principal, atornillada a una pieza triplay, no incluía el gabinete ni la fuente de poder. La Apple II, que apareció en 1977, ayudó a establecer el estándar de casi todas las computadoras personales que siguieron, incluyendo a la PC de IBM.
El mundo de las computadoras estaba dominado por dos tipos de sistema en 1980. Uno, la computadora Apple II, tenía un grupo de leales seguidores y una gigantesca base de software que crecía a una velocidad fantástica. El otro tipo, los sistemas CP/M, no solo consistía de un sistema, sino de los muchos sistemas que evolucionaron a partir de la Altair original de MITS. Estos sistemas eran compatibles entre sí y se distinguían por el uso del sistema operativo CP/M y de ranuras de expansión, que seguían el estándar S-100 (para ranuras de 100 pins
